
|
|
Fonctionnement physique du robot
Lors de l'analyse physique du fonctionnement du robot, nous fŻmes confrontťs ŗ certains
problŤmes. Entre autres, nous n'ťtions pas capables de faire bouger notre robot. Cela
ťtait dŻ au fait qu'il y avait une dťfectuositť physique de l'alimentation des
moteurs. La solution ŗ ce problŤme fut de changer le robot. Un autre robot nous fut donc
remis.
Ayant un robot fonctionnant bien, nous avons pu faire bouger le robot : le faire avancer, reculer et tourner. Celui-ci fonctionne en mode puissance, i.e. qu'il peut avancer et tourner en mÍme temps.
![]()
Interface graphique du logiciel
L'interface graphique du logiciel est rťalisťe ŗ l'aide des MFC de Windows dans l'interface de dťveloppement Visual C++ 5.0.
AperÁu de
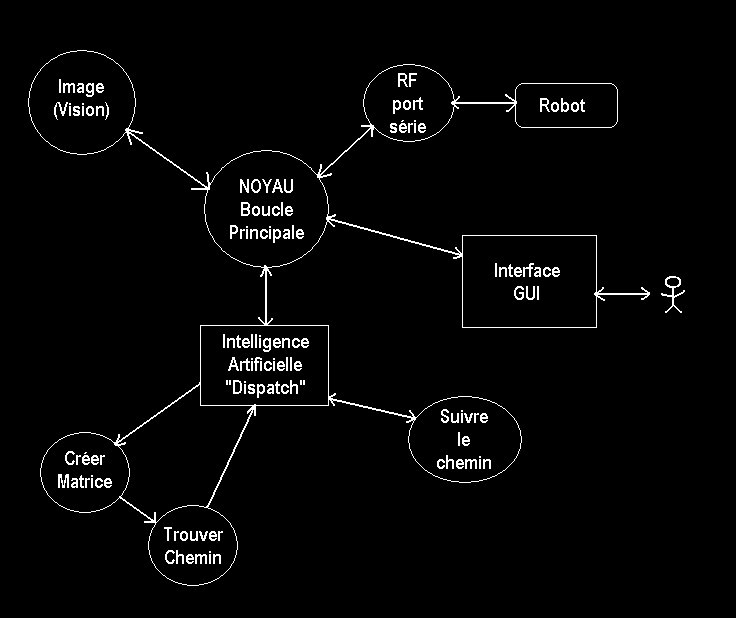
L'interface graphique permet ŗ l'utilisateur d'entrer des commandes au clavier pour commander le robot. Ce mode sera trŤs utile pour le dťverminage. Il existe un mode manuel/automatique. Le mode manuel permet ŗ l'usager de commander le robot et le mode automatique de laisser l'AI (intelligence artificielle) guider le robot. En mode manuel, l'interface envoie directement les commandes au port sťrie. En mode automatique, les commandes sont envoyťes au Noyau, la boucle principale du systŤme, qui elle-mÍme les enverra au port sťrie.
AperÁu de
L'interface recevra du robot (via le port sťrie) l'ťnergie dťpensťe pour le chemin
actuel, l'ťnergie totale restante ainsi que les informations provenant des capteurs du
robot. L'interface recevra de la boucle principale la position (X,Y) actuelle du robot,
son angle actuel, le nombre d'objets ramassťs, la destination finale du chemin et le
chemin ŗ parcourir pour aller chercher un objet.
L'interface affichera l'image provenant directement de la camťra, l'image traitťe par le traitement d'image incluant le chemin dťcidť par l'algorithme, les informations provenant du robot, les informations provenant des algorithmes, les boutons permettant de passer des commandes au robot (avance, recule, gauche, droite, prends, dťpose, reset, calibration) et les commandes se trouvant dans la pile FIFO du port sťrie. L'interface permet ťgalement une configuration du port sťrie.
Le principal problŤme survenu jusqu'ŗ maintenant dans le dťveloppement de l'interface graphique est sans contredit l'apprentissage de la programmation Windows avec les MFC. De bons livres de rťfťrence ainsi que la prise de conseils auprŤs de collŤgues connaissant les MFC fŻt la solution au problŤme. Les principaux problŤmes que nous allons rencontrer d'ici la rťalisation du projet est la coordination des entrťes/sorties avec la boucle principale (le Noyau) ainsi que la rťalisation de la communication avec le port sťrie.
![]()
Pour les transmissions RF, on utilise un module produit par la compagnie
ABACOMTechnologies. Celui-ci permet de transmettre et de recevoir un signal RS-232 de
faÁon "halfduplex” , c'est-ŗ-dire que le transmetteur et le rťcepteur
utilisent la mÍme frťquence, soit 433.92 MHz. Le signal est modulť en AM, et le module
fonctionne ŗ une vitesse maximale de 4800 bps. Nous avons commandť deux modules, un qui
sera installť sur le robot et l'autre qui sera installť sur l'ordinateur. Pour le
moment, les modules ne sont pas encore arrivťs.
Chaque module comportera une antenne unique pour la rťception et la transmission. Ce sera donc des monopŰles donc la longueur est du quart de la longueur d'onde. ņ une frťquence de 433.92 MHz, on aura donc des antennes longues de 17.28 cm.
Lorsque nous aurons les modules, il y aura certaines prťcautions ŗ prendre pour ťviter que du bruit ou des interfťrences perturbent la communication entre le robot et l'ordinateur. Tout d'abord, nous allons filtrer le signal envoyť et l'alimentation avec un filtre passe-bas pour Ítre sŻr qu'il n'y aient plus de frťquences ťlevťes qui viennent troubler notre signal. Ensuite, on installera un blindage mťtallique autour de notre carte comprenant le transmetteur et le rť cepteur.
Vu que les modules de communication envoient un signal TTL, il faudra convertir les signaux RS-232 ť mis par l'ordinateur et le robot en format TTL et l'inverse. Pour ce faire, nous utiliserons des convertisseur MAX232 de la compagnie Maxim. Une autre solution qui pourrait Ítre envisagťe pour la conversion serait d'utiliser des circuits simples comprenant un amplificateur opť rationnel et des diodes.
DerniŤrement, il nous reste quelques points mineurs ŗ vťrifier concernant la carte du robot oý sera installť le modulateur et le transmetteur. PremiŤ rement le brochage utilisť sur celle-ci, et la faÁ on dont la carte est alimentťe. Un autre point ŗ clarifier est le protocole ŗ utiliser pour diminuer la vitesse de transmission du robot de 9600 bauds ŗ 4800 bauds.
![]()
Notre t‚che est de fournir au noyau de notre logiciel les fonctions pour localiser le robot dans l'environnement, trouver les obstacles et trouver les objets. Le dťveloppement des fonctions se fait dans l'environnement C++ ŗ l'aide des librairies de tratement d'images MIL de Matrox.
AprŤs avoir acqui les images, nous appliquons une correction de perspective et nous dťcoupons l'image pour ne conserver que la partie dťlimitťe par l'aire de travail.
Pour trouver les obstacles, nous effectuons une sťparation des couleurs. Notre convention tient compte que tout ce qui est blanc constitue un obstacle. Nous mettons en oeuvre des mesures pour que seul les obtacles soient blanc. Nous renvoyons un vecteur contenant un point sur quatre de l'image pour que le noyau puisse crťer une matrice d'obstacles.
Pour trouver les objets, d'une forme d'un disque d'environ 2 cm de diamŤtre de couleur noir, on applique une sťparation des couleurs et ŗ l'aide des algorithmes de reconnaissance de formes, on identifie leur position. On retourne un vecteur contenant les coordonnťes au noyau.
Pour trouver le robot, on utilise les algorithmes de reconnaissance de formes. On retourne sa position et l'angle et qu'il fait suivant une rťfťrence.
Prťsentement, la fonction pour trouver les obstacles est complťtťe. En ce qui concerne les objets et le robot, nous ťprouvons quelques difficultťs avec les fonctions de reconnaissance de formes. Quand nous maÓtriserons ces derniŤres, il nous restera ŗ globaliser notre code pour qu'il puisse bien s'interfacer au noyau.
![]()
Section caractťristique principale
Notre robot ŗ la capacitť d'apprendre ŗ reconnaÓtre diffťrentes formes et ŗ les ramasser sur le terrain. Pour ce faire, on fait une acquisition du modŤle ŗ n'importe quel instant ŗ l'aide de l'interface. Ensuite, le robot va chercher la piŤce en question et la rapporte. Cette caractťristique principale est quelque peu diffťrente de notre premiŤre car le concept du casse-tÍte est un peu vague et notre robot ne possŤde pas une prťÁision suffisante pour exťcuter correctement ses t‚ches.
![]()
Le bloc ťlectrotechnologique comporte deux parties :
la rťalisation et l'alimentation de l'ťlectro-aimant.
la conception du module de surveillance des piles des moteurs et de l'ťlectronique.
L'ťlectro-aimant sera rťalisť ŗ l'aide de deux bobines ŗ milieux vide dans lesquelles une piŤce d'acier en U vient s'insťrer pour que le flux magnťtique ŗ l'intťrieur des bobines soit canalisť par la piŤce d'acier. Les deux bobines sont dťjŗ rťalisťes et comporte un trŤs grand nombre de tours de petit fil. Elles devront Ítre alimentť par les piles qui alimentent les moteurs. Pour obtenir une attraction suffisante, les deux bobines devront Ítre reliťes en parallŤle directement ŗ la source de tension des moteurs. L'ťlectro-aimant ŗ une rťsistance d'environ 24 (, elle absorbe donc un courant d'environ 375 mA sous une tension de 9 Volts. …tant donnť que l'ťlectro-aimant devra Ítre commandť par l'ťlectronique du robot, nous devront utiliser un bit de sortie du robot pour commander l'aimant. Lorsque le bit sera ŗ 0, l'ťlectro-aimant sera inactif et lorsque le bit sera ŗ 1, il sera actif. Ceci implique que nous devront concevoir un systŤme ťlectronique qui agira comme relais pour commander l'aimant ŗ partir du circuit ťlectronique basse tension et faible puissance du robot. Nous pourrons utiliser un transistor en commutation pour commander l'aimant.
Le contrŰle de l'ťtat des piles de l'ťlectronique du robot peut Ítre effectuť en observant la tension au borne de la batterie de piles. …tant donnť que le courant demandť par l'ťlectronique est relativement constant et connu , nous pouvons dťterminer l'ťtat des piles en fonction de la tension au borne du module ťlectronique du robot. On doit donc connaÓtre le courant absorbť par l'ťlectronique et la caractťristique de la tension d'une pile dťchargť par ce courant.
Pour ce qui est des piles alimentant les moteurs et l'ťlectro-aimant, il faudra tenir compte du fait que le courant dťbitť par les piles n'est pas constant. Une solution pour rťgler ce problŤme consisterait ŗ vťrifier l'ťtat des piles lorsque le robot est arrÍtť et que l'ťlectro-aimant est en fonction. En connaissant le courant consommť par l'ťlectro-aimant et en mesurant la tension aux bornes de la batterie de piles, on peut ainsi dťterminer l'ťtat des piles. Cette faÁon de faire nťcessite l'arrÍt du robot ŗ intervalle rťgulier pour vťrifier l'ťtat des piles et garder cette lecture constante pour le restant du temps. Il faut toutefois que cette lecture soit faite assez souvent pour ťviter que les piles ne se dťcharge trop entre chaque mesure.
Une des grandes difficultť de se systŤme est de mesurer la tension et de l'afficher numťriquement dans l'ordinateur. Une solution pour rťgler ce problŤme est d'utiliser deux des trois entrťes analogiques du robot. En effet, ces entrťes affichent un nombre numťrique sur 8 bits en fonction de la tension qui leur est appliquťe. Par contre, ces entrťes sont limitťes ŗ une tension maximale de 5 Volts, alors que la tension de la batterie des moteurs est de 9 Volts. On peut contourner se problŤme en utilisant un diviseur de tension ŗ l'entrťe analogique pour ramener le tension maximale ŗ 5 Volts. Par la suite, on peut connaÓtre la tension appliquť ŗ l'entrťe en utilisant la fonction analog(p) qui retourne un nombre compris entre 0 et 255 (8 bits) proportionnel ŗ la tension appliquť ŗ l'entrťe p du robot. Nous n'avons donc qu'ŗ multiplier ce nombre par une constante de proportionnalitť pour connaÓtre prťcisťment la tension de la batterie connectť ŗ l'entrťe correspondante.
![]()
Gťnťration de la matrice des lignes de niveau et dťtermination du meilleur chemin
L'ťtape de la matrice a ťtť rťalisť. C'est ŗ dire que pour un obstacle donnť, on place autour de lui des lignes de niveau dťcroissantes. Ces lignes de niveau tiennent compte bien sŻr des limites du terrain : les niveaux ne doivent pas dťpasser les bordures du terrain.
Maintenant, il reste ŗ dťterminer le meilleur chemin ŗ partir de cette matrice dťjŗ crťťe.
On pourrait faire en sorte que le robot choisisse les points de la matrice qui ont des bas niveaux mais c'est une mťthode qu'il faut affiner car elle ne peut Ítre fonctionnelle avec la plupart des situations. Nous pensons qu'il faut d'abord affiner encore un peu la matrice avant de laisser le robot faire son algorithme.
![]()
Descripion des traitements individuels :
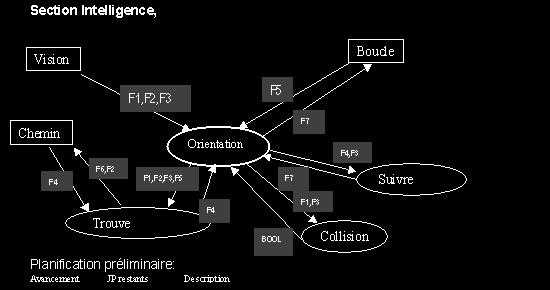
Intel_Orientation()
10% 7 Dťcide oý aller et s'occuper de gťnťrer le chemin pour y arriver.
Entrťes :
Vision
F1- Vecteur de coord. d'obstacles
F2- Vecteur de coord. d'objets
F3- Position robot et angle
Chemin
F4- Chemin thťorique : Vecteur de coord. de position dťsirť Boucle
F5- Mode de fonctionnement
Sortie: Puissance moteur
Intel_SN_TrouveDestination()
0% 2 Selon le mode et l'environnement, dťtermine oý sera la prochaine destination (point x,y).
Entrťes :
F1- Vecteur de coord. d'obstacles
F2- Vecteur de coord. d'objets
F2- Vecteur de coord. d'objets
F5- Mode de fonctionnement
Sortie:
F6- Destination: coord. (x,y)
Intel_SN_SuivreChemin()
5% 3 ņ partir du chemin fixť, gťnťrer les commandes nťcessaires pour y arriver.
Entrťe :
F3- Position robot et angle
Sortie :
F7- Puissance moteur
Intel_SN_Collision()
10% 1 Selon l'environnement et notre position, vťrifie si on doit tout arrÍter et recalculer le chemin ŗ prendre.
Entrťe :
F1- Vecteur de coord. d'obstacles
F3- Position robot et angle
Sortie :
VRAI / FAUX
Dťtails des algoritmes
Section Intelligence, (Intel)
Interface Haut niveau: Intel_Orientation()
Interface Appelť par: Boucle_Principale()
Intel_Orientation()
Entrťe: Mode robot enumťration
Erreur, IDLE, Chercher_piŤce, Porter_piŤce, Recharge
Sortie: Destination courante type point
Chemin thťorique, type vecteur de point
Position X,Y,tťtha du robot type float
But :
Interface: Voit_Environnement() - Section Vision
Voit_Position() - Section Vision
Chemin_TrouveChemin() - Section Chemin
Intel_Orientation( MODE_ROBOT )
Si (Rendu) Alors,
Retourne Rendu
Sinon,
Si (MODE_ROBOT = IDLE) Alors,
PUISS = 0
Sinon
Si (MODE_ROBOT change) OU (Intel_SN_Collision(POS,ENVIRONNEMENT) = VRAI) Alors,
ENVIRONNEMENT, POS = Voit_Environnement();
DEST = Intel_SN_TrouveDestination( MODE_ROBOT, POS, ENVIRONNEMENT );
CHEMIN = Chemin_TrouveChemin( POS, DEST, ENVIRONNEMENT);
Fin_Si
POS = Voit_Position();
PUISS, GAUCHE = Intel_SN_SuivreChemin( CHEMIN, POS )
Fin_Si
Retourne PUISS, GAUCHE
Intel_SN_SuivreChemin()
Entrťe: Chemin thťorique, type vecteur de point
Position X,Y,tťtha du robot type structure
Sortie: Puissance relative gauche type float 0 ŗ 1
Puissance gauche + Puissance droite = 100%
Facteur de ralentissement type float 0 ŗ 0.95
Pleine vitesse = 0%, Mode panique = 95%
But :
Algorithme ŗ dťterminer selon les structures dťfinitves des donnťes
Intel_SN_TrouveDestination
Entrťe: Mode robot enumťration
Erreur, IDLE, Chercher_piŤce, Porter_piŤce, Recharge
Position X,Y,tťtha du robot type structure
Environnement type structure
Sortie: Destination X,Y,tťtha du robot type structure
But :
Algorithme ŗ dťterminer selon les structures dťfinitves des donnťes
Intel_SN_Collision()
Entrťe: Environnement type structure
Position X,Y,tťtha du robot type structure
Sortie: VRAI : Collision effective ou imminente!
FAUX : keep it cool
But :
Algorithme Trivial
![]()
 Retourner ŗ la page
principale
Retourner ŗ la page
principale
© 1999 Peripleko Technologies Inc.