L'objectif central du projet UBI est:
Développer un système permettant à un micro-robot mobile de:
Comme on le constatera en consultant les exigences de base, le succès de l'intreprise reposera sur une intégration harmonieuse d'éléments nombreux et divers, réliés à l'électronique, l'informatique, le traitement de signal, les télécommunications, l'électrotechnologie et l'ergonomie des interfaces.
Exigences de base
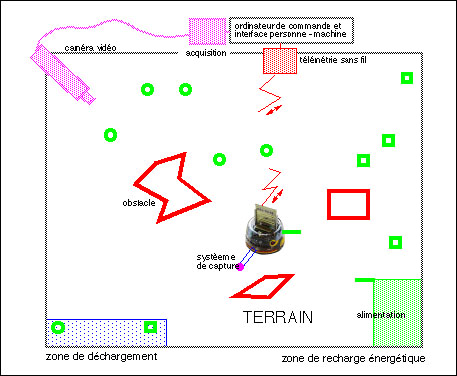
Le "terrain" sur lequel les essais seront effectués consiste
en une surface de plancher de l'ordre de 5m par 5m près de
laquelle des postes de travail PC sont accessibles.
Le robot sera en contact avec un poste de commande doté d'une interface personne machine évoluée permettant de monitorer son comportement interne (au minimum, sa position, sa vitesse, son orientation par rapport à l'espace de travail et à ces cibles, la charge de sa batterie et une estimation de sa période d'autonomie) de même que son environnement visuel.
La communication, initialement par câble modem (cette fonction est déjà construite dans le robot) devra être transformée pour utiliser des signaux sans fil, infrarouges ou hertziens.
La localisation sera basée sur l'utilisation d'images vidéo, possiblement améliorée par des données odométriques. L'environnement usager devra permettre de prescrire des trajectoires de déplacement et des tâches au moyen d'une interface graphique conviviale.
Une tâche de base consistera à saisir de (petites) pièces disposées sur le terrain et à les transporte dans une zone de déchargement en respectant des consignes spécifiques. On peut anticiper que la saisie s'effectue par moyen magnétique (qui est probablement le plus simple à implanter).
La navigation devra être à même d'éviter des obstacles.
La gestion énergétique du véhicule devra permettre de monitorer, à partir du poste de commande, l'état pertinent du véhicule et de lui enjoindre de se rendre à une zone permettant de recharger ses batteries. On devra concevoir un connecteur approprié, assurant un bon contact en dépit d'imprécision de position (qui vont survenir!!!)
Le tout devra faire l'objet d'une démonstartion et faire l'objet d'une documentation de haute qualité diffusée sur le site web du cours.
Exigences supplémentaires
Comme le veut la "tradition" dans GEL-16146, en plus des exigences de
base, chaque équipe devra identifier un objectif
supplémentaire qui conférera la personnalité
propre de sa réalisation. Cet objectif supplémentaire
devra être rapidement précisé au début du
trimestre en s'assurant qu'il fait concensus au sein de
l'équipe.
Un exemple de tel objectif supplémentaire pourrait être que le tout soit accessible via une interface www. Un autre pourrait être que la commande du robot soit "intelligente": on peu imaginer que le véhicule dépose les pièces sur la grille d'un jeu de tic-tac-to (dont l'"adversaire" est un (autre) agent dans le poste de commande - ou un robot adverse!!)
Pour mener à bien cette entreprise, vous disposez des éléments suivants:
Lors de l'élaboration du plan d'exécution, il est impératif de soigneusement identifier les étapes du projet. Si on établit une liste - préliminaire - des divers éléments techniques que votre entreprise devra maîtriser, il y a au moins:
Au plan gestion, il y a également un grand nombre d'éléments, dont notamment la répartition des tâches, les dates de livrables internes, les mécanismes de validation.
Gestion du risque: sur la problématique de détermination de la localisation du robot et ....
Si on examine la liste des éléments techniques, celui qui concerne la méthode de localisation doit probalement vous apparaître comme le plus risqué. Le succès de cet élément conditionne celui de l'ensemble. Il sera donc essentiel que vous y engagiez un effort particulièrement intense et - comme il s'agit d'une terre plus inconnue - que vous procédiez rapidement à des essais de principe sur des montages-prototypes.
L'approche de localisation que j'ai en tête dans le présent projet consiste à combiner 2 types de données:
Nous constatons ainsi que nous disposons de plusieurs sources d'information. Il serait sans doute "intelligent" des les combiner afin d'augmenter précision et fiabilité en procédant à ce que l'on appelle une "fusion sensorielle" (cette approche est très utilisée dans toutes les questions de mesures et d'instrumentation). Je vous invite vigoureusement à explorer cette avenue, notamment avec une approche appelée "filtrage de Kalman" fréquemment utilisée à cet effet.
La documentation qui vous est fournie par le volume "Navigating Mobile Robots: Sensors and Technique", qui est une source remarquable d'informations sur la navigation, comprend d'ailleurs un chapitre d'introduction sur le filtrage de Kalman, de même qu'une biographie pertinente.
La communication sans fil n'est nullement triviale, même si la largeur de bande requise est modeste. J'ai pensé un moment vous demander d'être en mesure d'utiliser une caméra vidéo (miniature) montée sur le robot mais l'ai mis de côté (poui cette année du moins ::))) car le développement d'un systèeme de communication permettant une transmission vidéo risquait d'être trop difficile. Par ailleurs le développement d'une unité d'acquisition et de traitement d'image embarquée sur le véhicule lui-même (qui serait l'approche à privi;égier au point opérationnel) dépasse, il me semble, ce qui peut être réalisé dans le cadre du temps dont vous disposez. ...
Au plan étectrotechnologie, ce qui vous est demandé ici est plus complexe qu'il n'y parait! La modélisation du comportement de batterie est fort complexe. Et le développement d'un connecteur permettant au robot d'aller se brancher lui-ême sur la borne de recharge de batterie risque de taxer quelque peu votre ingéniosité. ...