
Le projet CYCLOPE vise à contrôler un robot, le RugWarrior, et lui faire accomplir des tâches particulières, répondant à des spécifications. Celles-ci sont précisées dans un cahier de spécifications qui se résume comme suit.
Comme ce site doit être consulté par le public et conséquemment par des compagnies concurrentes, le détail des réalisations n'est pas livré de manière exhaustive. Le but est de conserver la propriété intellectuelle sur certains aspects stratégiques du dossier. Néanmoins, il est possible de se faire une idée suffisamment claire pour bien comprendre les réalisations dans leur globalité.
Une copie de ce site est disponible en un document HTML continu afin d'en faciliter l'impression.
Spécifications sommaires
L'aire de déplacement du robot mesure 4m sur 4m, et est surplombée par une caméra assurant l'acquisition de l'image. L'interface personne-machine doit être conçu pour "monitorer" le comportement interne du robot (sa position, sa vitesse, son orientation par rapport à l'espace de travail et à ses cibles, la charge de sa batterie et une estimation de sa période d'autonomie, ... ) ainsi que son environnement visuel. Un programme informatique est chargé de prescrire des trajectoires optimales de déplacement compte tenu de l'achalandage spatial et commander l'exécution de tâches spécifiques.
Les défis sont multiples, tant au niveau de l'électronique, de l'informatique, du traitement de signal, des télécommunications, de l'électrotechnologie ainsi que de l'ergonomie des interfaces. Conscient également de l'enjeu "humain" de ce projet, l'objectif premier de l'entreprise est de livrer un produit fonctionnel qui répond aux spécifications de base. Le second objectif, qui complète ce premier, est d'ajouter à ce produit une qualité distinctive à la discrétion de l'entreprise. L'intégration étant la pierre angulaire de la démarche, la modestie et la prudence sont de mise dans l'élaboration des objectifs à atteindre. En conséquence, nous prenons garde de tomber dans le piège de l'optimisation qui outrepasse les exigences prescrites.
L' approche systémique est favorisée pour aborder l'intégration des sous-systèmes. Cette approche consiste à spécifier tout processus en 3 composantes: ses entrées (intrants ou input); ses sorties (extrants ou output); jointes par un processus de transformation. Cette décortication rigoureuse et méthodique de chaque sous-système en ses composantes élémentaires tend à minimiser les oublies qui rendent l'intégration laborieuse.
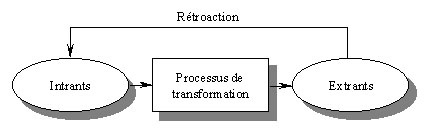
Figure 1 - Illustration du modèle systémique
Les commentaires de confrères et consoeurs de classe qui nous ont précédés constituent d'autre part une source précieuse de conseils que nous consultons tout au long du projet.
Décomposition et répartition des tâches
Au départ, le projet est décomposé en 5 spécialités auxquelles sont affectées les membres, en fonction de leurs affinités et de leurs compétences. La figure suivante montre cette décomposition du projet en spécialités et les personnes affectées à chacune.
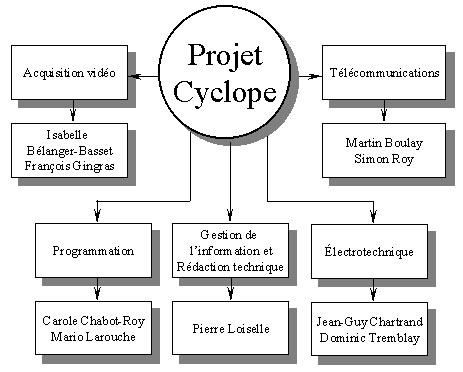
Figure 2 - Décomposition du projet et affectation des ressources
Cette répartition des tâches n'est pas immuable. Des membres aux compétences multiples peuvent également prêter leur collaboration aux membres affectés à d'autres spécialités. Hormis la dernière spécialité, la structure du présent rapport suit le découpage précédemment exprimé.
Pour maintenir un bon suivi de projet, des rencontres impliquant tous les membres de l'équipe sont tenues régulièrement chaque semaine, immédiatement après le cours de Design. Des rencontres supplémentaires s'ajoutent également au besoin. L'échéancier est préparé de manière à respecter les dates critiques prévues dans le plan de cours.
|
Activités
|
Dates limites
|
| Analyse du projet | 18 septembre |
| Développement de solutions pour chaque spécialité (80%) | 1er novembre |
| Dépôt du rapport préliminaire | 4 novembre |
| Développement de solutions pour chaque spécialité(100%) | 23 novembre |
| Intégration des spécialités | 9 décembre |
| Dépôt du rapport final | 14 décembre |
| Présentation du fonctionnement du robot et exposé oral sur une spécialité du projet | 16 décembre |
Tableau 1 - Échéancier
Auto-évaluation
Cette sous-section trace un bilan du projet en terme de forces et faiblesses et fait un bilan des acquis. Elle sert également de conclusion au projet.
1. Forces et faiblesses
Au moment de rédiger le rapport, nous n'avons pas encore réalisé le plein fonctionnement de la solution intégrée. Nous sommes toutefois en droit de reconnaître que la qualité distinctive visée dans ce projet, consistant à faire réaliser au robot des dispositions géométriques des pièces à manipuler, n'a pu implémentée.
Le premier point positif consiste à avoir suivi un cheminement sans tomber dans les dédales de l'optimisation. Nous recherchions au départ une solution qui se veut avant tout fonctionnelle et répondant aux spécifications de base énoncées.
Au niveau de la gestion administrative du dossier, l'utilisation d'un formulaire type pour les rapports internes d'avancement a mis de l'homogénéïté dans la structure de l'information véhiculée dans l'entreprise, dans ses rapports internes et externes. Ce formulaire est rempli par chacune des spécialités selon les items suivants:
Voir le rapport intermédiaire du 18 octobre.
La répartition retenue a capitalisé sur les forces de chacun des membres et assuré un rendement optimal de la compagnie.
2. Acquis
Finalement, l'équipe tire un bilan positif de ce projet. Ce succès repose sur la pleine collaboration et l'initiative de chacun des membres de l'entreprise, lesquelles ont fait de ce projet, une expérience enrichissante et formatrice.
Recommandations
Références
Projet Cyclope
Navigating Mobile Robots: Sensors and Technique , A. K. Peters, Ltd., Wellesley, 1996, MA (13 Mo) http://ftp.eecs.umich.edu/people/johannb/pos96rep.pdf.
NIELSON, Jakob. Top Ten Mistakes in Web Design, mai 1996, consulté le 22 octobre 1999. http://www.useit.com/alertbox/9605.html
GéoRobot - Rapports intermédiaires