
Projet UBI
Objectifs et spécifications
L'objectif central du projet UBI est:
Développer un système permettant à un
micro-robot mobile de:
-
se localiser dans un environnement de laboratoire et
-
d'utiliser cette information pour piloter correctement une trajectoire
de navigation déterminée
-
au moyen d'un poste de commande évolué qui communique
avec lui par une liason sans fil.
Exigences de base
Le "terrain" sur lequel les essais seront effectués consiste
en une surface de plancher de l'ordre de 5m par 5m près de laquelle
des postes de travail PC sont accessibles. Le robot sera en contact
avec un poste de commande doté d'une interface personne machine
évoluée permettant de monitorer son comportement interne
(au minimum la charge de sa batterie, sa position, sa vitesse, son orientation
par rapport à l'espace de travail). La communication, initialement
par câble modem (cette fonction est déjà construite
dans le robot) devra être transformée pour utiliser des signaux
infrarouges ou hertzien. La localisation sera basée sur l'utilisation
d'ondes sonores, possiblement améliorée par des données
odométriques. L'environnement usager devra permettre de prescrire
des trajectoires de déplacement au moyen d'une interface graphique.
Le tout devra faire l'objet d'une démonstartion et faire l'objet
d'une documentation de haute qualité diffusée sur le site
web du cours.
Exigences supplémentaires
Comme le veut la "tradition" dans GEL-16146, en plus des exigences
de base, chaque équipe devra identifier un objectif supplémentaire
qui conférera la personnalité propre de sa réalisation.
Cet objectif supplémentaire devra être rapidement précisé
au début du trimestre en s'assurant qu'il fait concensus au sein
de l'équipe.
Pour mener à bien cette entreprise, vous disposez des éléments
suivants:
-
Une documentation fort complète, tant sur les principes pertinents
que sur le robot spécifique, choisi parce qu'il possède des
architectures mécanique, électronique et informatique
parfaitement ouvertes. La section Informations
et ressources contient un liste importante de liens et de documents
disponibles sur le web. Des copies papier de certains d'entre eux vous
seront prêteés pour le trimestre.
-
Un micro-robot mobile de type "rug warrior" doté de facilités
de traitement et de communication de base intégrés (microcontrôleur
68HC11, communication série, plusieurs capteurs intégrés).
Les moyens de communication devront être enrichis et le contrôleur
intégré devra être agencé de manière
à fonctionner en synergie avec un PC externe qui fournira intelligence
supplémentaire et interface personne-machine. Des capteurs supplémentaires
devront être ajoutés et interfacés.
-
Des capteurs permettant d'étudier la localisation spatiale par ondes
sonores et ultrasonores.
-
De sources sonores (émetteur et amplificateurs) au coin de l'espace
de travail. Vous devrez développer l'unité de commande et
de synchronisation de ces sources.
-
D'un poste de travail de développement
-
D'un environnement de dévelopement logiciel spécifique au
robot de même que des ressources logicielles générales.
Identification des composantes du projet
Lors de l'élaboration du plan d'exécution, il est impératif
de soigneusement identifier les étapes du projet. Si on établit
une liste - préliminaire - des divers éléments
techniques que votre entreprise devra maîtriser, il y a au moins:
-
Analyser les requis, bien s'assurer qu'on les comprend et que les objectifs
sont clairs.
-
Se familiariser avec les ressources matérielles, notamment la plate-forme
robotique.
-
Se familiariser avec les ressources logicielles, comme celles du développement
sur Windows (qui sera probablement l'environnement que vous utiliserez)
de même que la ressource Integrated C et les librairies spécifiques
au robot et à ses prériphériques.
-
Développer la stratégie de localisation par moyens sonores,
en effectuant des recherches appropriées, des mesures expérimentales
de validation et des essais préliminaires d'implantation.
-
Développer la stratégie de communication sans-fil, en examinant
de manière détaillée les alternatives infrarouge vs
radio, en évaluant leurs avantages et désavantages respectifs,
et en élaborant une couche logique de communication qui puisse se
marier efficacement à la communication par câble qui est déjà
fournie.
-
Elaborer l'architecture de l'unité électronique supplémentaire
que vous ajouterez au robot et la manière dont elle pourra s'interfacer
avec le circuit de commande déjà incorporé.
-
Elaborer l'architecture du poste de commande, en examinant les questions
de simulation, d'interface personne-machine, en prévoyant les modes
nécessaires (par ex. mode "déverminage", mode "supervisé",
mode "gestion", mode "autonome ou semi-autionome", etc.
-
Définir les conventions d'interface, aussi bien entre l'électronique
et l'informatique qu'entre les divers segments informatiques.
-
Prévoir les moyens et mécanismes de documentation continue
des décisions et travaux, conçus afin d'assurer une circulation
fluide entre les membres de l'entreprise.
-
Etc.
Au plan gestion, il y a également un grand nombre d'éléments,
dont notamment la répartition des tâches, les dates de livrables
internes, les mécanismes de validation.
Gestion du risque: sur la problématique de détermination
de la localisation du robot
Si on examine la liste des éléments techniques, celui
qui concerne la méthode de localisation sonore doit probalement
vous apparaître comme le plus risqué, et ceci à plusieurs
titres. D'une part, vos connaissances en acoustique sont probablement peu
développées, et d'autre part la fonctionnalité de
localisation est tout à fait fondamentale pour permettre l'exploitation
sunséquente du robot. Le succès de cet élément
conditionne le succès de l'ensemble. Il sera donc essentiel que
vous y engagiez un effort particulièrement intense et - comme il
s'agit d'une terre plus inconnue - que vous procédiez rapidement
à des essais de principe sur des montages-prototypes.
L'approche de localisation que j'ai en tête dans le présent
projet consiste à combiner 3 types de données:
-
Des données de type odométrique: connaissant les commandes
de déplacement qui activent les roues motrices, on est en principe
capable de les intégrer pour en arriver à déduire
en tout temps la position et l'orientation de l'unité mobile. L'approche
est correcte mais souffre de nombreux aléas: par exemple, les roues
peuvent glisser, le sol peut avoir un relief irrégulier, la position
est relative.
-
Des données par sonar: nous avons commandé pour chaque
robot un kit sonar que la firme Polaroid a initialement développé
pour la mesure de distance de ses caméras et qui est très
populaire en robotique. L'unité comporte un émetteur et un
récepteur avec l'électronique de commande, facilement interfaçable
au robot qui est mis à votre disposition. Le principe du sonar est
simple, mais cette approche souffre également de problèmes.
Il y a notamment qu'aux fréquences utilisées (et utilisables)
dans l'air libre, la plupart des surfaces des scènes où nous
évoluons agissent comme des miroirs presque parfaits (la "rugosité"
de leur surface étant très petite par rapport à la
longueur d'onde) avec le résultat que le faisceau, une fois émis,
subit typiquement de nombreuses réflexions, et que le temps de transit
de l'écho reçu (donc la distance "mesurée") n'est
pas nécessairement la distance directe et apparente. Un autre problème
vient du fait que l'angle d'émission est typiquement assez large:
il serait difficile d'obtenir une image sonar d'un environnement dont la
résolution spatiale dépasserait, disons, 10 pixels x 10 pixels.
-
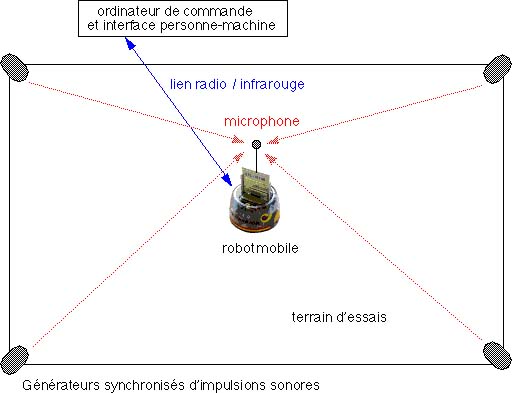
Nous vous proposons d'explorer une seconde méthode sonore, que nous
avons avons imaginé pour le présent projet, et qui consistera
à conserver le récepteur (microphone) sur la plate-forme
mobile, mais à placer les émetteurs en des endroits fixes
(et connus) à la périphérie de la zone de travail,
tel que suggéré sur la figure ci-dessous. On imagine qu'il
serait possible de mesurer le temps entre l'émission d'une impulsion
brève et sa réception sur le microphone. Mais il faudrait
connaître exactement le moment de l'émission, qui est indépendante
du robot. Le concept que je vous propose ici et de générer
une suite d'impulsions qui sont décalées dans le temps d'une
manière fixe et précise; le microphone recevra ces impulsions
avec des retards qui correspondent à ceux de leur émission
plus le temps de transit. Comme le décalage d'émission est
connu, il est facile d'en extraire un temps de transit différentiel.
Vous pourrez vous convaincre que cette différence définit
un lieu dans le plan. En utilisant plus de deux sources, l'intersection
des lieux de transit devrait être en mesure de fournir l'endroit
précis de réception. On notera ici que l'approche possède
des similitudes par rapport à la stratégie des systèmes
de localisation par satellites géostationnaires, le "Global Positionning
System". Vous aurez à votre disposition 4 sources (haut parleurs
et amplis) qui seront placées à des points de référence
fixes dans l'espace de travail. Chaque équipe devra cependant
construire l'unité électronique qui produit les impulsions
(soigneusement décalées) de son système; cette unité
devra être conçue pour qu'elle puisse se brancher sur les
amplificateurs en un tourm de main. Vous aurez à vous préoccuper
de la directivité des signaux sonores, en souhaitant par exemple
que le microphone ait un patron de réception omni-directionnel.
Ici je vous invite à explorer des configurations diverses de microphones
et à vous renseigner sérieusement sur le rôle critique
que le pavillon de l'oreille humaine (la pinna) joue sur la perception
spatiale de notre systèeme auditif, qui est tout à fait remarquable.
Nous constatons ainsi que nous disposons de plusieurs sources d'information.
Il serait sans doute "intelligent" des les combiner afin d'augmenter précision
et fiabilité en procédant à ce que l'on appelle une
"fusion sensorielle" (cette approche est très utilisée dans
toutes les questions de mesures et d'instrumentation). Je vous invite vigoureusement
à explorer cette avenue, notamment avec une approche appelée
"filtrage de Kalman" fréquemment utilisée à
cet effet.
La documentation qui vous est fournie par le volume "Navigating Mobile
Robots: Sensors and Technique", qui est une source remarquable d'informations
sur la navigation, comprend d'ailleurs un chapitre d'introduction sur le
filtrage de Kalman, de même qu'une biographie pertinente.
GEL-16146, Denis Poussart, 30 juillet 1998