
UBI-CONTRÔLE
Contenu
-
Documentation de référence
-
Liens interressants
Réalisations
Développement des
fonctions adaptées au Rug Warrior
Cette partie du développement
consiste à relever des données de position , les transmettre
à un ordinateur hôte afin dexécuter
une commande motrice calculé par celui-ci . Afin de ne pas surcharger
les exécutions du robot , la majorité des
traitements sont fait sur l'ordinateur . Vous trouverez ,dans ce compte-rendu
,le schéma de fonctionnement du robot ainsi
que le cheminement parcouru pour atteindre nos objectifs.
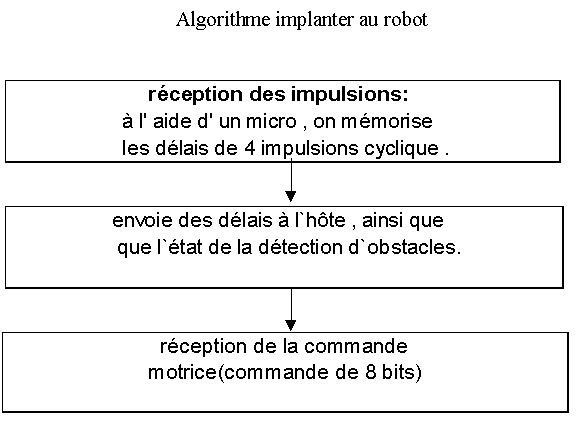 Figure 1 : plan du
progamme
Figure 1 : plan du
progamme
Initialisation
Linitialisation contient
principalement la déclaration des variables utilisées pour
les commandes et la mise en fonction
du nput-capture2 servant pour la détection acoustique(voir section
suivante) . De plus , il est important de
désactiver le `pcode` utilisé par interactive C . Cette désactivation
permet davoir libre accès au port série du
microcontrôleur et ainsi
pouvoir établir un lien avec lordinateur hôte .
| retour au contenu |
Réception des impulsions(détection
acoustique)
Afin de positionner le robot
, on utilise un cycle de 4 impulsions dont les pulses sont décalées
de 150 millisecondes
.À raison dun cycle par seconde , nous avons établie une
séquence facile à synchroniser et
permettant déliminer leffet des échos . Le générateur
produit des impulsions à 10 kHz facilement détectable
avec un micro bon marché .
 Figure 2 : schéma
des impulsions vs le temps
Figure 2 : schéma
des impulsions vs le temps
Le micro utilisé est
filtré par un filtre passe bande autour de 10 kHz , fréquence
évitant de détecter les bruits
ambiant . Nous avons ajusté nos gains afin de capter des signaux
relativement fort par rapport aux
échos pour une meilleur fiabilité .
Pour savoir notre position
, nous devons calculer les délais entre chacune de nos impulsions
. Pour ce faire , on
utilise la fonction input-capture du 68HC11 permettant de détecter
des pulses et de savoir le moment exacte
de leurs arrivés . En effet , la particularité de cette fonction
est de mémoriser le temps de son registre compteur
. Ainsi , lorsquune pulse est détecter , son temps est automatiquement
insérer à ladresse du input-capture. Le registre compteur
est de 16 bits avec une vitesse dhorloge de 2 Mhz , ce qui représente
un débordement
à toute les 32.7 ms .
Au commencement , nous comptions
le nombre débordement mais nous nous sommes rendu compte quon
surchargeait le contrôleur,
ce qui avait pour conséquence de nous donner une précision
de 1200 coups dhorloge
: environ 0.6 ms dincertitude .
Puisque nous savons que lon
a environ 4-5 débordement entre chaque pulse , nous pouvons facilement
utilisé la
donnée la plus probable . Cette procédure nous a permis de
réduire lincertitude à 200 coups dhorloge (0.1ms) .
Pour synchroniser notre système
, nous utilisons des fonctions définis dans interactive C . Il existe
des fonctions permettant
de calculer un temps en millisecondes . Il suffit simplement de remettre
à zéro un compteur et de faire appel
à la fonction mseconds() , fonction retournant un float indiquant
un temps en ms . Ainsi , on identifie notre
première pulse en vérifiant si nous avons eu un délai
plus grand que 300 ms entre deux pulses . Ensuite , on
fait une série de input-capture pour mémoriser le temps entre
chaque pulse . On insère une attente de 100ms entre
chaque détection pour éliminer les réflexions immédiate
. Après cette attente , on « clear » le flag du input
capture pour recevoir la pulse
suivante et ainsi de suite.
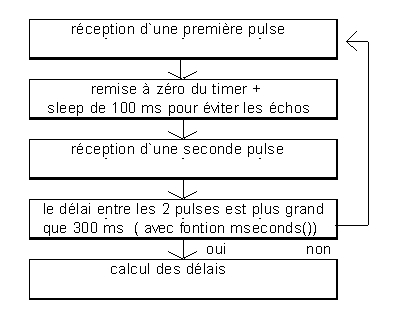 Figure 3 : algorithme
de synchronisation
Figure 3 : algorithme
de synchronisation
Envoie des données
à l`hôte
Lors de l`initialisation du
processus , on désactive le pcode utilisé par interactive
C afin d`avoir le contrôle sur le
port série . Nous ne changeons pas la configuration du port
, c`est-à-dire qu`on communique à 9600 bauds ,
un stop bit et un start bit .
Après avoir reçu
les quatre impulsions , on transmet les données retenues par le
input-capture et on envoie l'état
des bumper . Ainsi , l`hôte peut calculer les délais entre
chaque pulse et peut savoir s`il y a des obstacles devant
le robot . On utilise pas de protocole spéciale , on ne vérifie
pas si la donnée a été reçu car on se contente
d`une procédure transmission
/ réception simplement . Ce qui est important de remarquer , c`est
que le register compteur
du 68hc11 est de type `signed` , ainsi le compteur contient une valeur
comprise entre 0 à 32 768 et passe
ensuite de -32 767 à -1 .C`est alors qu`il se produit l`débordement
. Nous avons perdu du temps sur la compréhension
du compteur et sur la façon de taiter la donnée . En effet,
après une multitude de tests , nous avons
découvert que le contrôleur ne pouvait pas traiter rapidement
nos calculs . C`est qu`il fallait faire des calculs
sur 32 bits
ce qui est trop long pour le robot. Nous avons réglé
le problème en laissant calculer les délais
à l`ordinateur . Ainsi
, on a simplement quatre états de compteur(16 bits) à envoyer
à l`hôte ; ce qui réduit la quantité `information
à transmettre . Il aurait fallu transmettre trois délais
de 32 bits comparativement à quatre états de
compteur 16 bits présentement
utilisé.
La commande reçue
au robot est codée sur huit bits . nous avons un bit pour la vérification
de la batterie , trois bits
pour les commandes de rotation* et 2bits de vitesse des roues pour chacune
des roues .
Nous avons des problèmes
avec les encoders de roue faisant en sorte que nous n`avons aucune précision
dans la rotation
. Ainsi , nous n`utilisons pas beaucoup ces commandes ajustant plutôt
la vitesse des roues pour faire une rotation
. C`est plus lent mais nous avons préféré cette méthode
pour une meilleur performance à ce stade-çi du
projet . Il serait question de
changer les encoders de roues pour la prochaine session pour avoir une
meilleure capacité
à savoir la distance parcourue par le robot
| retour au contenu |
Conclusion
N'ayant pas beaucoup d`informations
sur le robot , il a été difficile d`avancer rapidement pour
la communication
série. Ainsi , une
fois cette étape franchit , nous avons rapidement progresser pour
avoir ce résultat finale . Avoir
réussit plus tôt
la communication série , nous aurions probablement un meilleur système
puisque nous connaissons
quelques unes des erreurs
qui se produit lors des tests pratique , notamment au niveau de la vitesse
de traitement
des données qui est
plus lent que prévus . Ce problème amène des modifications
majeurs au projet
mais il faut
le donner au client comme
ça!
| retour au contenu |
Système
de positionnement par impulsions sonores
Voici la représentation du circuit de réception
des impulsions sonores :
Dans ce shémas lampli et et le filtre sont
réalisés grace avec un MF 8. Le comparateur sera réaliser
avec un
comparateur et un potentiomètre (je nai
pas le numérau parce que jutilise actuellement un ampli OP). Le
régulateur sera un 7812 et la source de
tension supplémentaire sera une pile 9V (qui sera en série
avec notre
alimentation actuelle).
Ce circuit a été testé en remplaçant
le micro par un générateur donde. Dans les conditions de
ce test, le circuit
fonctionnait correctement. Il faudra cependant
effectuer des tests avec le micro pour être certain que ce circuit
est approprié à notre application.
Bien que nous ayons déjà une bonne
idée de comment faire, nous navons toujours pas élaboré
le programme
du microcontrôleur qui traite la sortie de
ce signal.
En plus des échange dinformation et avec
le robot et de son contrôle, le PC devra envoyer un signal de syncronisation
au robot lorsque lorsquun série de quatre
impulsions débutera.
En fait, puisque notre travail avec le microcontrôleur
sest résumé jusquà présent à essayer
de comprendre le
protocole de communication avec le PC. Il nous
faudra par la suite, au besoin, modifier cette interface en plus
dy ajouter le contrôle des différents
périphériques que nous avons rajouté au robot.
**Cette section est à
jour dans le rapport final
Informations
supplémentaires
Documentation de référence
:
Code source des routines :
Liens interressants :